





New York: The US researchers have designed a robot hand, the first device of its kind, to join an advanced sense of touch with motor-learning algorithms and it doesn’t rely on vision to manipulate objects.
Robotics researchers have long been trying to create “true” dexterity in robot hands, but the goal has been frustratingly elusive. Robot grippers and suction cups can pick and place items, but more dexterous tasks such as assembly, insertion, reorientation, packaging, etc., have remained in the realm of human manipulation.
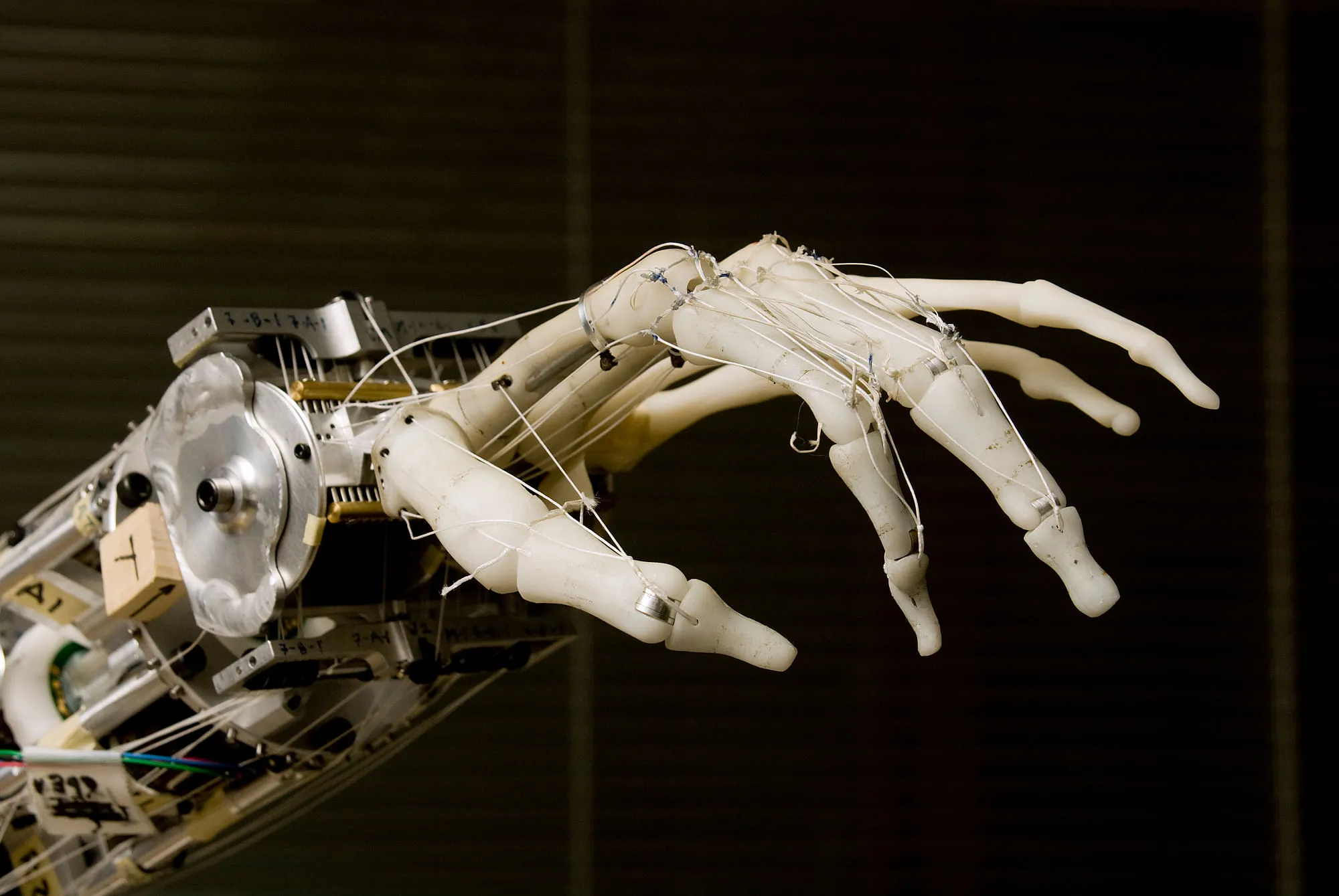
Researchers at Columbia University demonstrated a highly dexterous robot hand, one that combines an advanced sense of touch with motor learning algorithms in order to achieve a high level of dexterity.
The robot hand has five fingers and 15 independently actuated joints — each finger has been equipped with the team’s touch-sensing technology.
As a demonstration of skill, the team chose a difficult manipulation task: executing an arbitrarily large rotation of an unevenly shaped grasped object in hand while always maintaining the object in a stable, secure hold.
This is a very difficult task because it requires constant repositioning of a subset of fingers, while the other fingers have to keep the object stable. Not only was the hand able to perform this task, but it also did it without any visual feedback whatsoever, based solely on touch sensing.
In addition to the new levels of dexterity, the hand worked without any external cameras, so it’s immune to lighting, occlusion, or similar issues.
And the fact that the hand does not rely on vision to manipulate objects means that it can do so in very difficult lighting conditions that would confuse vision-based algorithms — it can even operate in the dark.
“While our demonstration was on a proof-of-concept task, meant to illustrate the capabilities of the hand, we believe that this level of dexterity will open up entirely new applications for robotic manipulation in the real world,” said Matei Ciocarlie, Associate Professor in the Departments of Mechanical Engineering and Computer Science.